
双足四足机器人:从电影“流浪”到现实
从机器人的发展历程来看,让门框机器人和“笨笨”成为现实也是迟早的事。
如果你看过《流浪地球2》,那你一定会被里面的机器狗“笨笨”圈粉,它不仅可以感知主人的情感,自己也拥有丰富的情绪,让人很想在家里也养一只。除了“笨笨”,电影里一台造型别致的“门框机器人”(Framer)也吸引了不少观众的目光,它不仅可以架枪输出,还能加盾防御,安静站在那里时就成了一个安检门,它还可以潜入海底执行任务,几乎无所不能。
尽管机器人早已是科幻电影的“常驻角色”了,但不难看出,制作团队依然想打破人们对机器人的刻板印象。只是局限于当前的技术能力,想要在现实生活里1:1复制一台电影里面的机器人,恐怕没那么容易。但这并不意味着未来没有可能,从机器人的发展历程来看,让门框机器人和“笨笨”成为现实也是迟早的事。
双足机器人,离“门框”还有多远?
波士顿动力在这几年公开了不少Atlas双足机器人的影片,比较有名的像是后空翻、跳舞、跑酷,还有最近在一块模拟工地的区域帮忙搬运物品,每一次更新都能刷新人们对机器人的认知。
这些成果,源自人类对机器人最初的幻想,这可以追溯到15世纪末,达·芬奇绘制的一幅“机器武士”,这台机器人依靠风力和水力驱动,但这在当时也只能停留在想象当中。
真正在现实世界登场的人形机器人,直到1928年才正式公开。当时,西屋电气工程师Roy J. Wensley为了推广一款名为“Televox”的变电站控制单元,他将Televox包装成一台名为“Herbert Televox”的机器人,在纽约的Level Club亮相。
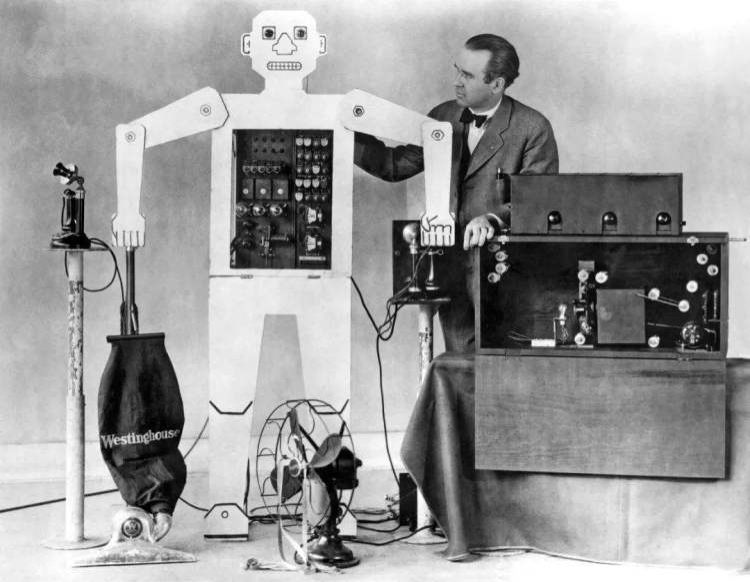 Herbert Televox
Herbert Televox
Herbert Televox的“本体”依然是Televox控制单元,它的一部分可以放在操控室,另一部分放在变电站内,利用音叉振荡器产生不同频率,当接收端的Televox收到频率转换成可解读的编码,并通过电话线将编码传输到变电站,变电站根据编码内容采取相应动作,实现远程遥控。
至于Herbert Televox,如果以现代机器人的标准来看,它的外观只能用“粗糙”来形容,一眼看过去也不过是一块人形立牌,但是在功能上,它可以控制远处的开关,的确也符合“未来仆人”这样的描述。Wensley还为Herbert Televox设计了一个噱头:在几年乔治·华盛顿诞辰的那天,机器人为一幅华盛顿的肖像揭幕。
Wensley为控制单元取名字,还赋予它外形和性格的想法被视为一项创举,使大众对机器人有了一个更具体的概念。
不过真正能够行走的双足机器人直到40多年后才能看到端倪。1971年,日本早稻田大学教授加藤一郎研发出的WAP-3是世界第一台三维双足机器人,可以静步行走。WAP-3为机器人的开发奠定了基础,加藤一郎也被誉为“世界人形机器人之父”。
 WAP-3
WAP-3
我国第一台登上媒体的双足人形机器人是由国防科技大学在2000年公布的“先行者”,这台身高140厘米的机器人,能够以1秒2步的速度行走,突破了我国双足步行机器人只能6秒1步的纪录。
 先行者
先行者
和日本本田公司在同一年公布的ASIMO相比,先行者虽然外观简陋,但它所搭载的收音与发音能力,也在当时为人机交互模式带来更多灵感。
不过当时对双足/人形机器人研究最为瞩目的依然是日本,2003年,丰田推出的“Toyota Partner Robot”能够演奏乐器;2011年,本田推出的All-New ASIMO已经可以利用传感器避障,手指也十分灵活,具备基本的行动能力。
 Toyota Partner Robot
Toyota Partner Robot
在这之后,再一次让人们颇为震撼的双足机器人,就是波士顿动力2016年2月公布在官方YouTube频道的Atlas。影片展示了Atlas在地面上行走、开门,然后在户外的雪地中行走,并且可以很好的调整重心,不会摔倒,搬运货物也得心应手,摔倒后可以恢复站立状态。
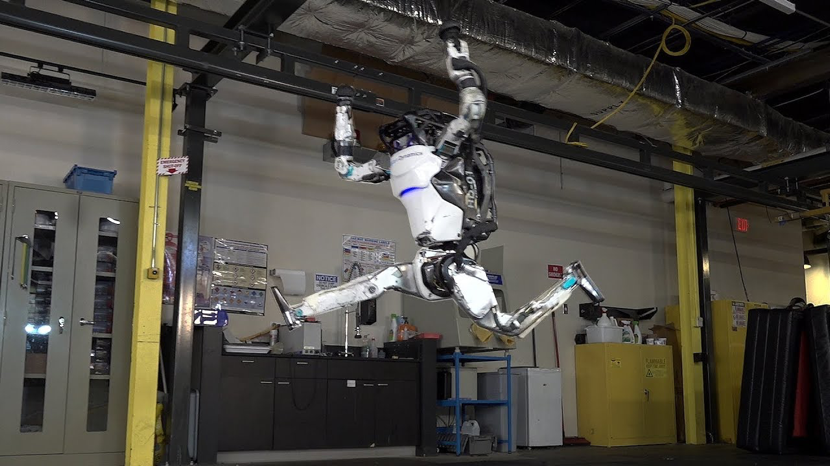 波士顿动力的Atlas双足机器人
波士顿动力的Atlas双足机器人
这段标题为“Atlas, The Next Generation”的影片很快登上各大媒体的版面,尽管《华盛顿邮报》评价它像“喝醉了的钢铁侠”,却依然没有减少它带给人们的震撼。在这之后的发展我们也有目共睹,官方持续公布Atlas的最新能力,像是后空翻、跳舞、在模拟工地搬运物品等等。但遗憾的是,Atlas至今尚未商业化,而第一款商业化的双足机器人是Agility Robotics在2020年推出的Digit,售价25万美元,主要用途也是仓储、工业等场景。
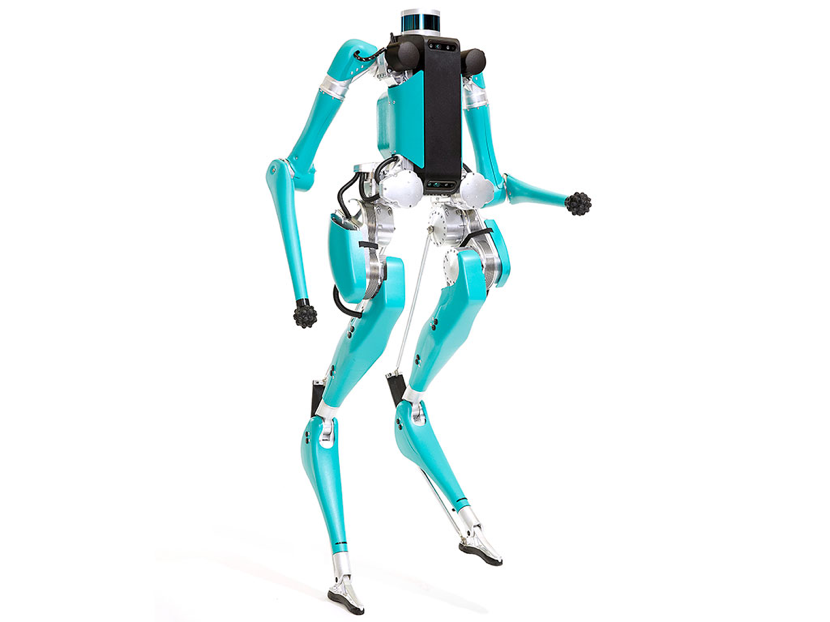 Agility Robotics的Digit机器人
Agility Robotics的Digit机器人
不过有一个好消息是,埃隆·马斯克的特斯拉Optimus机器人未来也许会成为你家里的帮佣。他曾在去年9月预言,未来这台机器将可供家用,包括做晚餐、修剪草坪、照顾长者,甚至成为人类的“伙伴”,甚至成为性伴侣。
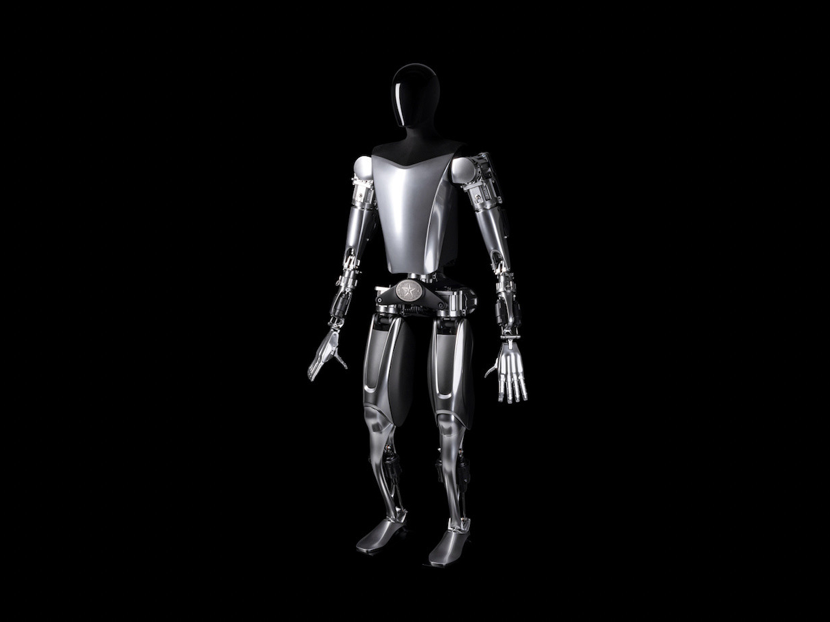 特斯拉Optimus机器人
特斯拉Optimus机器人
称赞Optimus的同时,马斯克当然也不忘贬损一下竞争对手。他表示,目前的人型机器人都“没有脑子”,它们没有自行解决问题的能力,且造价非常昂贵,创造的价值却很低。
不过机器人专家Christian Hubicki在Twitter上对Optimus给出了不太一样的评价,尽管他称赞在没有对机器人采取安全措施的情况下进行现场演示的做法很大胆,但他也强调这款机器人的可靠性有待观察。
Optimus可望在未来成为离我们日常生活最近的机器人之一,那“门框机器人”什么时候才能走进现实呢?像“门框机器人”一样功能丰富的双足机器人,以目前的技术水平恐怕还很难实现,其中最难攻克的也许就是电池技术了,能够支撑如此多变的形态,需要更先进的高能量密度电池。
不过好在有电动车浪潮的驱动,能量密度更高、更安全的固态电池技术已经成为各大电动车厂商竞逐的阵地,甚至有厂商发表在“2030年之前,将固态电池应用到量产的车辆上”这样的豪言壮语,但电动汽车电池厂商StoreDot CEO Doron Myersdorf认为这不可能实现,因为让固态电池量产还需要十年左右的时间,更实际的做法是采用半固态电池,目标是到2028年实现大规模生产。
不论电动汽车还是机器人厂商,攻克电池与充电技术都将为产品的升级迭代提供有力支撑,这个过程,也需要我们付出更多的时间和精力,相信有一天,我们会看到门框机器人那样,或同样级别的机器人设备出现在日常生活当中。
四足机器人,已无限接近“笨笨”!
比起门框机器人,《流浪地球2》当中的机器狗“笨笨”看起来更容易实现,因为我们在过去几年已经看过许多行动灵活的四足机器人,其中最有名的当然就是波士顿动力的Spot。
相比Atlas,Spot的“成长”速度快多了,这款机器人早在2019年就已经成为商品。这的确也可以理解,至少在掌握平衡方面,有四条腿总比两条腿要容易一些,但事实真的如此吗?
其实四足机器人同样经历了漫长的发展过程。世界上第一台有记载的四足机器人是Chebyshev在1870年设计的一台器械,它拥有四条腿,通过对角线的连接分成两组,它只能进行简单的站立、行走和奔跑,但无法适应复杂的地形,所以只能在平坦的表面上行动。
在这之后,L.A.Rygg在1893年申请了一项可骑行的四足机器人的专利,这台机器人的动力来自骑手脚下的踏板,结合连杆和曲柄的联动,使它能够行走。
到了20世纪,南加州大学的R.McGhee与A. A. Frank在1968年共同研究了一台名为Phony Pony的四足机器人,由电机驱动,能够利用控制系统让机器人行进,或是慢速的奔跑。
 Phony Pony
Phony Pony
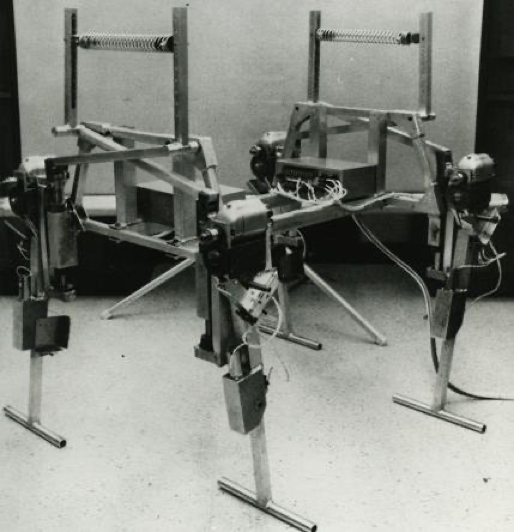
在这之后McGhee研究了更多机器人,其中包括诞生于1977年的六足机器人OSU。OSU被视为行走机器人历史上的重要里程碑,也是第一台由电脑控制的行走机器人。到了1986年,McGhee还与Waldron一起打造了ASV六足步行机,具有很好的地形适应能力。
这段时间以来,日本的研究人员也正着手于四足机器人的研发,其中比较有名的就是东京理科大学教授广濑茂男与机器人专家梅谷阳二在1982年研究的PV-II,这台10公斤重,1米高的机器人能够上下楼梯、在凹凸不平的地面行走,同样具有里程碑意义。
 PV-II
PV-II
而四足机器人的商业化早在20世纪80年代就已经出现了,1983年,Odetics公司推出ODEX-1,这是一台六足机器人,后来的迭代版本也被用于一些工业场景。
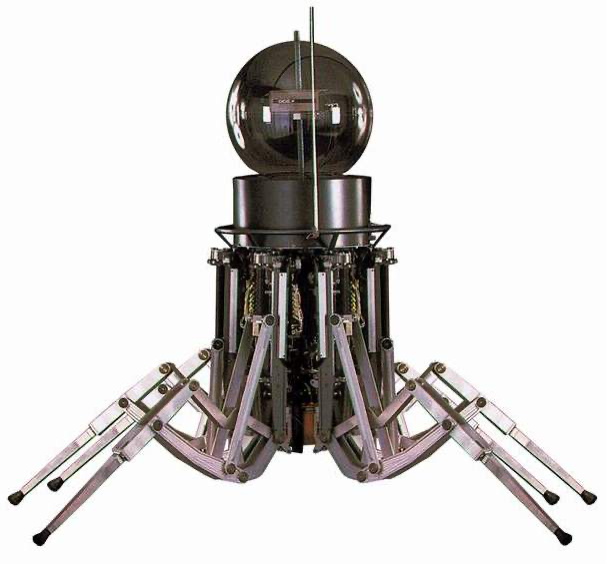 ODEX-1
ODEX-1
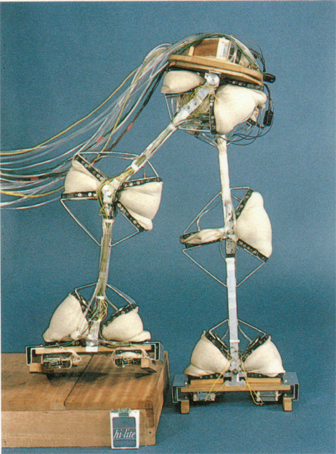
不过到这时为止的四足机器人都属于静态稳定系统,麻省理工学院教授Marc Raibert在1986年开发了第一台能够行走和奔跑并且完全动态稳定的四足机器人,先从单腿的动态稳定入手,再应用到设备上。Raibert在1992年创办了波士顿动力,这之后我们也看到了BigDog、LittleDog、AlphaDog、Cheetah Robot、RHex Rough、WildCat等四足机器人的问世,还有2015年2月在YouTube公开的Spot,以及在2017年11月公开,拥有更精致外观的新版Spot。
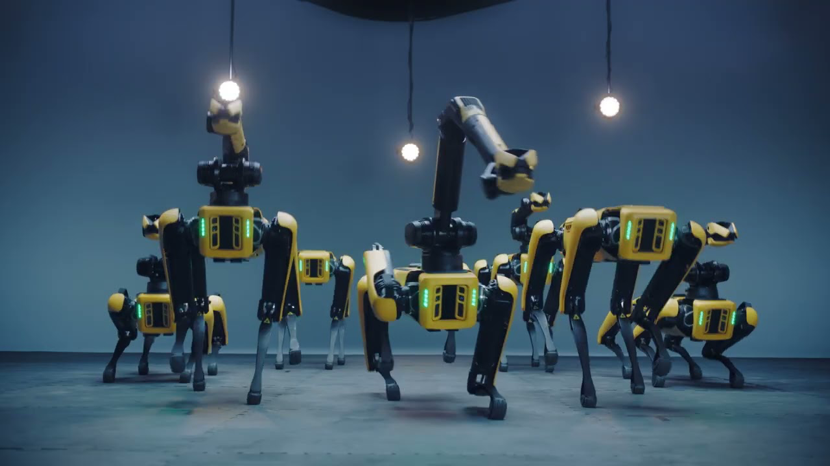 波士顿动力的Spot机器人
波士顿动力的Spot机器人
和Atlas一样,波士顿动力先公布了几段影片来介绍它具备怎样的能力,像是奔跑、传递物品、开门、上下楼梯、跳舞、拖拽卡车…… 直到2019年9月24日,Spot的第一部广告片公开,波士顿动力正式将这条“大黄狗”商业化。
像Spot这样的四足机器人,主要面向工业场景使用,而且使用起来也需要较高的技术门槛,主要功能也是执行人类设定好的动作,工具属性很强,放到日常生活当中,这种造型也非常不友善,很容易吓到别人。
《流浪地球2》里的“笨笨”更像是Spot与陪伴型四足机器人(如索尼Aibo)的结合体,在工具属性的基础,加一点点娱乐属性,不仅可以帮助人类完成任务,还可以感知人类情感,同时能够表达各种情绪。想要实现这些功能,只需要结合一定的人工智能技术与相应的传感器就可以实现了,而这些技术在目前已经具备一定的成熟度,而且有厂商推出过结合实用与娱乐两种特质的陪伴型四足机器人。
总部位于加州山景城的Koda打造的同名机器人,能够像真实的狗一样与人类互动、在家中自由行动,可以提供陪伴、导盲,或是护卫等工作。相比Spot,Koda的造型比较圆润,如果把它视为一种“家用电器”的话,这外观也算得上“百搭”,但强烈的金属质感,反而带给人一种冰冷的感觉。
 Koda
Koda
电影中图恒宇的“笨笨”也是充满机械感的造型,但与其他机械狗不一样的地方是,它恐惧死亡,还会违抗命令,似乎拥有自我意识。在人工智能领域,这一直是颇具争议的点。去年,Google工程师Blake Lemoine因为公开主张人工智能LaMDA具有自我意识,而引发广泛争议,但Lemoine的观点也遭到科学家们的反驳,认为LaMDA只是一个运算能力较强的聊天机器人。
那“笨笨”是一个怎样的存在呢?想要在现实世界完整复刻一台“笨笨”,恐怕要先考虑一个更为复杂的问题。
各式各样的人工智能已经渗透到我们数字生活中的每一个角落,未来的双足/四足机器人势必也会在不同程度上搭载人工智能技术,这意味着,我们迟早要面对这背后的伦理问题。当你在波士顿动力的影片中看到工作人员用力推倒Atlas、Spot的时候,出于人性的本能,你可能会对它产生一丝同情。
当一台机器人的表现越来越接近真实的人类或动物,那么它们是否已经开始产生自我意识了呢?科学家和一般人的判定也许会很不一样,但如果这一天真的到来了,科学问题将变成伦理问题,到时候人们的观念,甚至法律都要跟着改变了。
本文章选自《AI启示录》杂志,阅读更多杂志内容,请扫描下方二维码